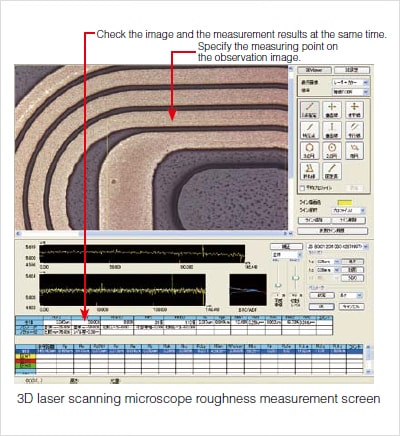
非接触式表面粗糙度/轮廓测量仪器
非接触式测量仪器使用光代替接触式测量仪器中使用的触针。这些仪器有多种类型,如共焦和白光干涉,并根据使用的原理而变化。还有各种接触式探测器,用光学传感器和显微镜代替探头,变成非接触式仪器。我们将以KEYENCE公司的3D激光扫描显微镜VK-X系列为例来解释共焦原理。
三维激光扫描显微镜利用共聚焦原理,以激光为光源,测量目标表面的粗糙度。
系统配置如图右侧所示。将样品置于测量单元的XY台,进行3D扫描。
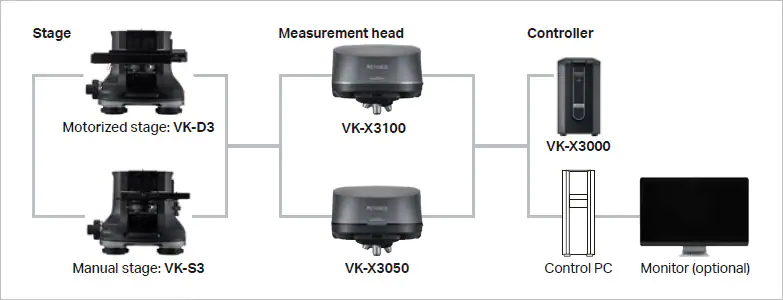

在KEYENCE的VK-X系列中,一个X-Y扫描仪嵌入在测量单元中。激光光源沿X、Y方向扫描目标表面,获取表面数据。
扫描原理解释如下。
三维激光扫描显微镜测量原理
- 1.从激光光源发出的激光束扫描目标表面。
- 2.激光从目标表面反射,通过半镜,进入光接收元件。在这一点上,接收反射的激光强度,以及透镜的高度位置,被显微镜记录下来。激光显微镜在X方向上采集1024个数据点,在Y方向上采集768个数据点,并记录每个点(1024 X 768 = 786432个点)的亮度和透镜高度。
- 3.当一个表面的扫描完成后,物镜向Z方向移动指定的间距。
- 4.对物镜移动到的表面再次进行同样的表面扫描,检查激光的反射光强度超过1024 × 768点。将每个像素的反射光强度与记录在存储器中的反射光强度“v”进行比较。如果新的反射光强更高,则反射光强数据和透镜高度位置数据被覆盖。
- 5.对于指定的Z距离重复步骤(2)到(4)的操作。
- 6.最后,对于每1024 × 768像素,在接收到最强的激光反射时,将反射光强度和透镜高度位置记录在内存中。
- 7.对于光学显微镜,当物镜聚焦时,WD(工作距离:物镜到目标物的距离)是恒定的。如果假设图像时,反射光强度最大,可以获得三维数据观测区域(1024×768像素)的显微镜缝合在一起的镜片高度位置不同时间的图像焦点,也就是说,当反射光强度达到最大值时。
3D激光扫描显微镜精度
准确读出反射光强度峰值的能力对激光共焦测量系统的测量精度有很大的影响。
构建共焦光学系统的方法有很多种。的针孔共焦方法KEYENCE 3D激光扫描显微镜的使用说明如下:
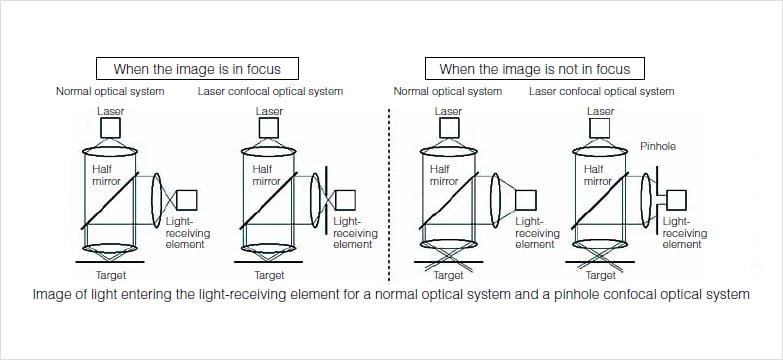
与针孔共焦方法,在光接收元件的前面放置一个针孔。针孔的直径只有几十微米,当图像没有聚焦时,针孔有阻挡反射光的作用。
当图像聚焦时(见下图),反射的光被普通光学系统和激光共焦光学系统中的光接收元件接收。当图像没有聚焦时,反射光(失焦光)进入普通光学系统的光接收元件,但在使用针孔共焦方法时被针孔阻挡。换句话说,这种结构使得反射光只有在图像聚焦时才进入光接收元件。
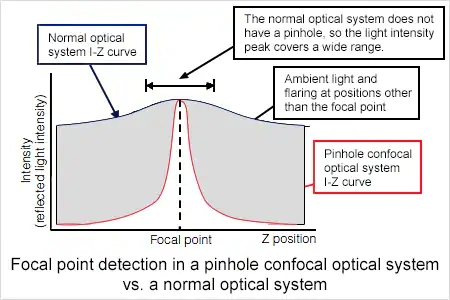
针孔对接收光的影响如图所示。激光共焦时,反射光强度在焦点处达到峰值。另一方面,正常的光学系统会产生一个平缓的倾斜曲线。
当目标处于焦点时,在焦点上缺乏峰值使得检测困难。
激光XY-direction决议
对于非接触式系统,光斑对应于接触式系统的触头。非接触式系统不直接接触目标,因此它们不存在触针磨损和划伤样品的风险。为了准确测量样品的轮廓,束斑直径的大小是很重要的。一般来说,束斑直径越小,可以测量的特征就越小。
激光显微镜使用激光作为光源,这使得产生极小的光斑成为可能。
当使用150x (N.A. = 0.95)物镜时,VK-X系列使用404 nm紫激光作为其激光光源,其分辨率达到0.13 μm0.005毫升为平面空间分辨率。激光显微镜可以测量非常小的宽度,这是不能测量的接触式系统。