
安装A时安全光幕或其他电气检测保护装置,请参阅在到达危险区之前停止机器的最小所需距离当身体进入检测区域时。这些距离在ISO 13855等标准中有定义。安装光幕时,请确保提供安全距离(最小距离),该安全距离由使用光幕的国家或地区的标准、法规和法律等因素确定。
根据ISO 13855计算安全距离
安全距离(S) =人体接近速度×响应时间+附加距离(根据传感器检测能力不同而不同)
进场垂直方向
机器停止和安全距离所需的最长时间之间的关系
通过添加以下两个参数来形成公式中所示的值T. T = Maximum time required by the machine to stop + response time of the light curtain (ON → OFF)
当k(渗透速度)= 2000mm 78.74“/ s时,例如,当使用GL-R08H光幕时(响应时间为0.0069 s)
s = 2000 mm 78.74“/ s×(机器停止最长时间+ 0.0069 s)+ c
如上所示,机器停止所需的最长时间乘以渗透速度(2000毫米78.74”/ s),所以如果所需的最长时间机器停止增加仅仅是1秒,安全距离增加了(2000毫米78.74“/ s×1 s = 2000毫米78.74”)。光幕响应时间每增加1 ms,安全距离增加2 mm 0.08”。
基本计算例子
垂直方向:GL-R系列
-
计算示例(1)-1
使用GL-R60H时
(探测能力d = 25 mm 0.98"和60束轴)
-
条件:工业应用
K = 2000毫米78.74"/秒
T1(GL-R60H响应时间)= 0.0157s
机器停机最长时间T2 = 0.1s
C = 8×8(25 - 14)= 88毫米×(0.98 - 0.55)= 3.46”
S = K × T + C = 2000 ×(0.1157)+ 88 = 319.4mm
S = K×T + C = 78.74“×”(0.1157)+ 3.46 = 12.57 "
如果S大于500mm 19.69”,再次进行计算,K等于1600mm 62.99”/ S。如果新计算的结果S小于等于500 19.69”,则设置S为500 19.69”。
-
计算示例(1)-2
当使用GL-R08L
(检测能力d = 45 mm 1.77“和8梁轴)
-
条件:工业应用
k = 1600 mm 62.99“/ s
T1(GL-R08L响应时间)= 0.0069秒
T2(机器停机最长时间)= 0.1 s
C = 850 mm 33.46“
S = K × T + C = 1600 × (0.1069) + 850 = 1021.04 mm
s = k×t + c = 62.99“×(0.1069)+ 33.46”= 40.20“
平行方向:GL-R系列
-
计算示例(2)1
当使用GL-R30L
(探测能力d = 45 mm 1.77”和30束轴)
-
条件:工业应用
k = 1600 mm 62.99“/ s
T1(GL-R30L响应时间)= 0.0105秒
T2(机器停机最长时间)= 0.1 s
h = 200 mm 7.87“
C = 1200 - 0.4 × 200 = 1120毫米
C = 47.24“ - 0.4×7.87”= 44.09“
S = K × T + C = 1600 × (0.0105 + 0.1) + 1120 mm = 1296.8 mm
s = k×t + c = 62.99“×(0.0105 + 0.1)+ 44.09”= 51.06“
通过绕过检测区域的顶部来接近危险:GL-R系列
当不可能阻止人们越过探测区顶部接近危险区域时,需要在考虑这个问题的同时确定光幕的高度和最小距离S。将如下图计算的S值与“垂直接近方向:GL-R系列”中计算的S值进行比较,将较大的值设为最小距离S。
根据下表中所示的根据下表(危险区域的高度)和B(光幕检测区域的顶部的高度)所示确定CRO。
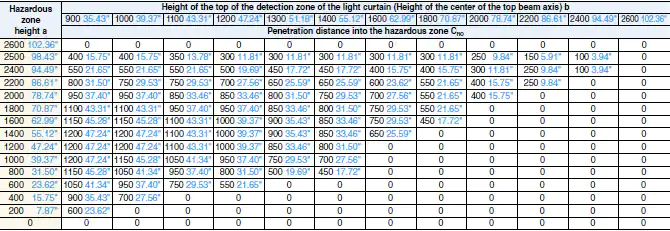
1探测区顶部高度低于900毫米35.43"的情况不包括在内,因为这种情况不能提供充分的保护,防止绕过和跨越。
*2如果检测区域的底部距离参考平面的高度超过300 mm 11.81”,则不能提供足够的保护,防止通过检测区域接近危险。
-
计算示例(3)-1
使用GL-R60H时
(检测能力D = 25 mm 0.98“,60梁轴,检测高度为1180 mm 46.46”)
-
条件:工业应用
A(危险区域的高度)= 1400 mm 55.12“
B(光幕检测区域的顶部的高度)= 1180 + 300 = 1480 mm 46.46“+ 11.81”= 58.27“
-
-
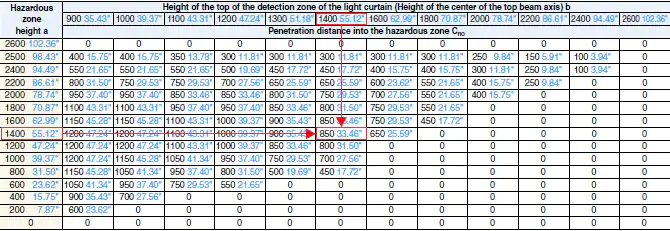
根据上表,CRO为850 mm 33.46“。
(因为B为1480 mm 58.27“,它在1400 55.12”和1600 62.99之间“。在这种情况下,使用B值为1400 55.12”。)
- k = 1600 mm 62.99“/ s
- t1 (GL-R60H响应时间)= 0.0157 s
- T2(机器停机最长时间)= 0.1 s
-
S = K × T + CRO = 1600 × (0.1157) + 850 = 1035.12 mm 62.99”×(0.1157) + 33.46”= 40.75”
(这比“垂直接近方向:GL-R级数”下计算的S值大。)
-
计算例(3)-2
当使用GL-R80H
(探测能力d = 25 mm 0.98”,波束轴80,探测高度1580 mm 62.20”)
-
条件:工业应用
A(危险区域的高度)= 1400 mm 55.12“
B(光幕探测区顶部高度)= 1580 + 300 = 1880 mm 62.20”+ 11.81”= 74.02”
-
-
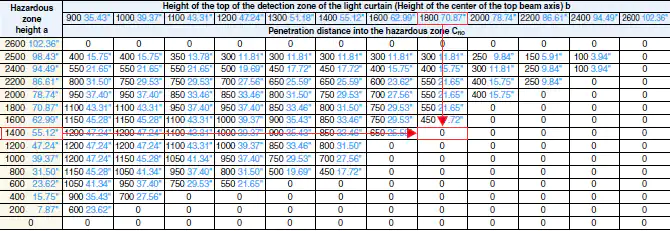
根据上表,CRO为0 mm 0”。
(因为B是1880 mm 74.02“,它在1800 70.87”和2000 78.74之间。在这种情况下,使用B值为1800 70.87“。)
- K = 2000毫米78.74"/秒
- t1 (GL-R80H响应时间)= 0.0192 s
- T2(机器停机最长时间)= 0.1 s
-
S = K × T + CRO = 2000 × (0.1192) + 0 = 238.4 mm 78.74”×(0.1192) + 0”= 9.39”
(这小于“垂直方法方向:GL-R系列”下计算的S值。)


























